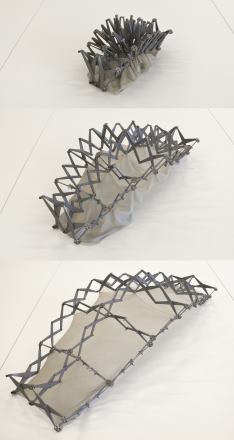
Through quick and simple manipulations, deployable scissor grids can undergo large transformations in volume and in shape. This feature makes scissor grids fit for a wide variety of mobile, temporary or adaptable applications in architecture, engineering and design. Unfortunately, their design process is burdened by complexity and is furthermore hampered by an incomplete and fragmented knowledge of their design potential.
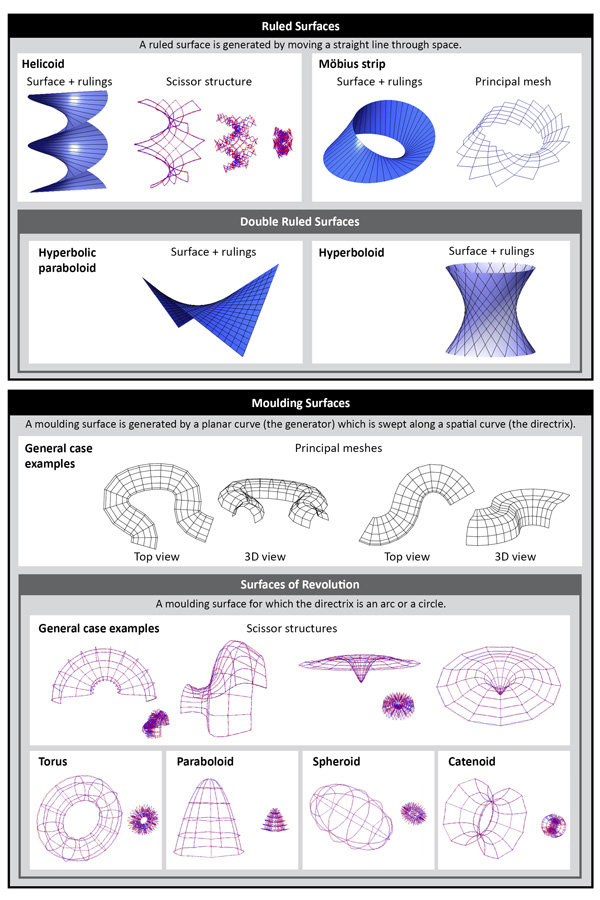
This doctoral thesis presents a comprehensive overview of the geometric and kinematic design potential of deployable scissor grids. This overview gathers the existing scissor grid concepts as well as numerous new design possibilities that greatly expand the freedom of shape and deployment behaviour. Charts, tables and information sheets provide a guide through the initial design phases of scissor grids. Thanks to rich illustrations of a myriad of practical design examples, this work doesn’t only aim to inform, but also to inspire.